一、 科学研究背景
海洋资源开发离不开船舶的动力定位技术。水面无人船在执行沉船打捞、货物装卸或人员救助等任务时,其质量常会因载荷变化而发生突变。短时间内的持续质量变化会显著降低动力定位精度,甚至引发船舶失稳,导致倾覆等严重事故。传统单一控制策略在面对此类动态质量变化时,往往难以同时保证系统在不同状态下的稳定性和定位精确性。因此,设计能够适应质量变化特性的切换控制策略,对解决无人船系统的动力定位问题是至关重要的。
另一方面,为降低无人船系统在实际作业中的通讯成本与提升控制设计可靠性,有效节约通信带宽资源并抑制复杂干扰也是关键需求。基于事件触发的综合抗干扰切换控制方法为解决无人船动力定位问题提供了新思路。该方法不仅能够提高无人船系统高精度动力定位需求,而且可以有效优化通信负载,提高控制策略的可靠性,具有重要的理论创新价值与工程应用前景。
二、 主要科技成果
针对受多源海洋干扰影响的无人船动力定位问题,欧博abg官方网站赵颖副教授在《IEEE Transactions on Intelligent Transportation Systems》发表题为“Time-event-memory triggered switching dynamic positioning for unmanned marine vehicles with mass-switched and dual-source disturbances”的科技论文。该期刊为智能交通领域顶级期刊,最新影响因子7.9,现属于中科院1区Top期刊。

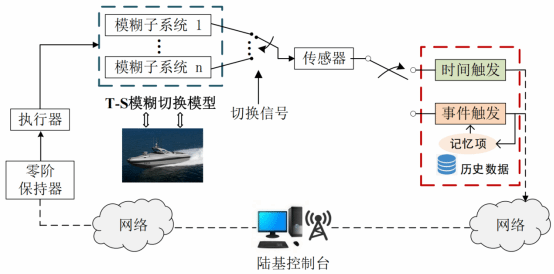
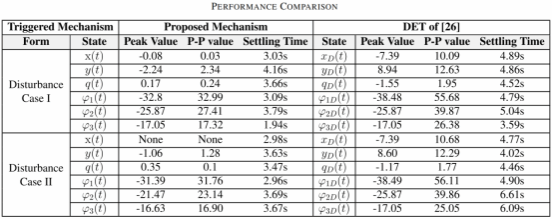
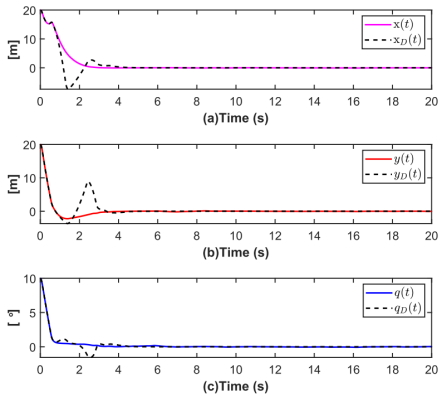
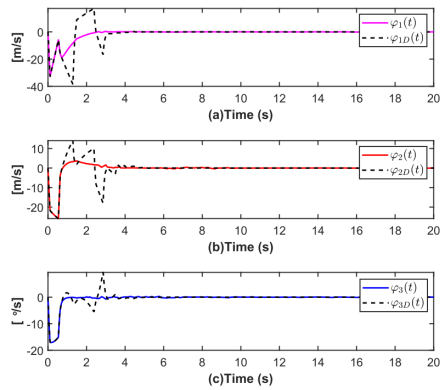
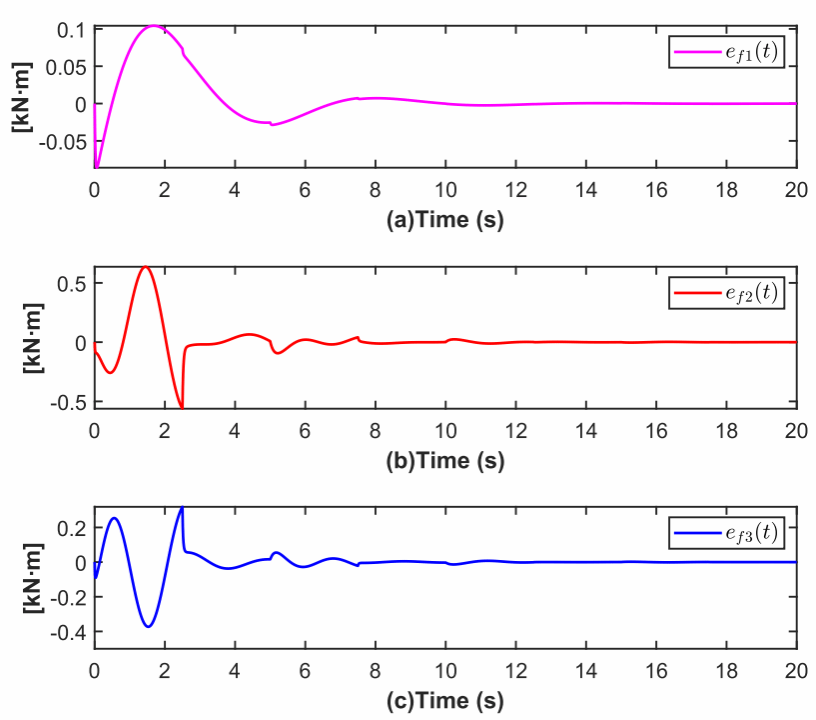
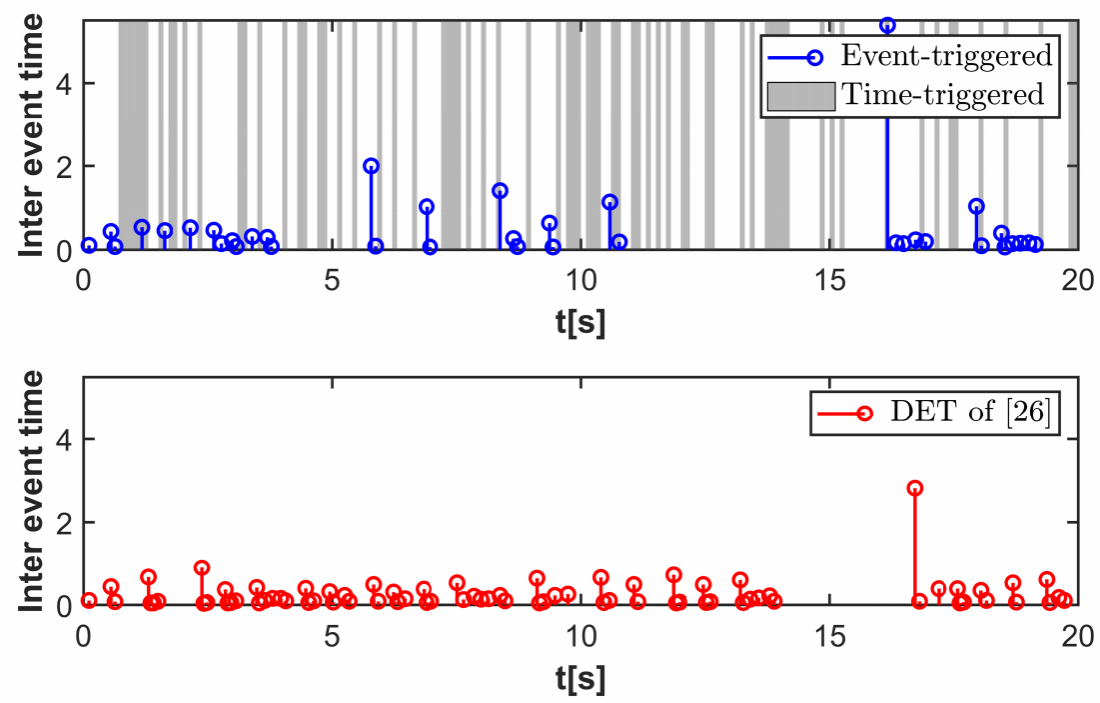
本研究针对无人船的动力定位控制问题,研究了无人船在质量切换、多源干扰作用下的时间-事件-记忆触发切换动力定位控制问题。首先,引入具有多源干扰的切换T-S模糊模型来描述无人船系统。然后,构造了一个干扰观测器来估计波浪漂移。通过融合时间、事件和记忆元素来选择触发规则。其次,在观测器和触发规则的基础上,提出了一种切换动力定位控制方案,以实现多源干扰作用下的动力定位以及通信资源的优化利用。最后,以供应船为例,验证了所建立的切换动力定位控制方案的可行性。
三、 成果应用前景
本研究提出的时间-事件-记忆触发切换动力定位控制策略,解决了质量突变工况下受多源干扰影响的无人船动力定位稳定性的问题,在无人船领域具有重要的应用参考价值和发展前景,特别是在多任务载荷切换、恶劣海况适应等方面展现出一定的优势。此外,该研究为智能船舶、海洋工程装备的自主化发展提供新的技术思路,对提升我国海洋装备智能化水平、构建现代化海洋产业体系具有重要的意义。
四、 成果贡献人及项目资助情况
成果由欧博abg官方网站副教授赵颖、2022级硕士研究生郭世旭、2021级硕士研究生林枫力、东北大学郭戈教授共同完成,郭戈教授为论文共同通讯作者。本项研究得到国家自然科学基金基金(项目编号:62373072、62173079、U1808205)和中央高校基本科研业务费专项资金(项目编号:3132024109)资助。
五、成果联系人及联系方式
成果联系人:赵颖
联系方式:15042430262

